Cinematica inversa de un robot de 2 grados de libertad
La cinemática inversa de un robot de 2 grados de libertad es un tema que puede parecer complejo para aquellos que no están familiarizados con la robótica. En términos simples, la cinemática inversa se refiere al proceso de calcular los movimientos necesarios de un robot para llegar a una posición deseada.
En el caso de un robot de 2 grados de libertad, esto significa que el robot puede moverse en dos direcciones diferentes. Por ejemplo, podría tener un brazo que se mueva hacia arriba y hacia abajo, y otro brazo que se mueva de izquierda a derecha. Para que el robot llegue a una posición específica, es necesario calcular los movimientos necesarios para cada uno de estos brazos.
Para entender mejor cómo funciona la cinemática inversa en un robot de 2 grados de libertad, es útil compararlo con una tabla HTML. En una tabla HTML, se pueden ajustar las dimensiones de las columnas y filas para crear una estructura específica. De manera similar, en un robot de 2 grados de libertad, se pueden ajustar los movimientos de los brazos para llegar a una posición específica.
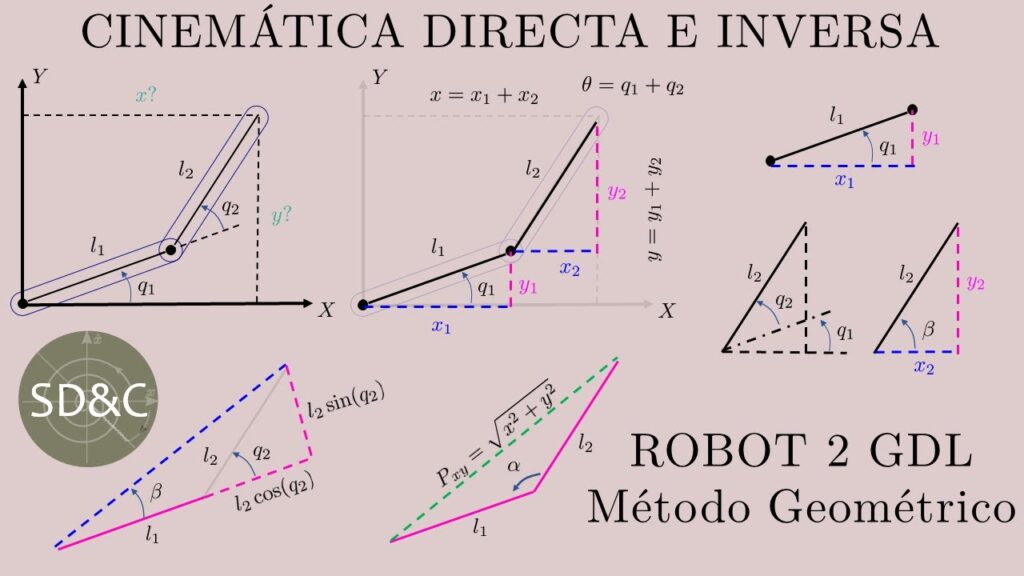
Hay varias formas de calcular la cinemática inversa en un robot de 2 grados de libertad. Una de las técnicas más comunes es la cinemática geométrica, que utiliza las ecuaciones de traslación y rotación para calcular los movimientos necesarios. Otra técnica es la cinemática analítica, que utiliza la geometría y las matemáticas para resolver el problema.
En general, la cinemática inversa de un robot de 2 grados de libertad requiere de un conocimiento profundo de las matemáticas y la física. Sin embargo, también existen herramientas y programas que pueden simplificar el proceso. Por ejemplo, algunos robots vienen con software que permite calcular automáticamente los movimientos necesarios para llegar a una posición específica.
En conclusión, La cinemática inversa de un robot de 2 grados de libertad es un tema complejo pero importante para aquellos interesados en la robótica. Se trata de un proceso necesario para que los robots puedan moverse de manera precisa y llegar a posiciones específicas. Aunque requiere de un conocimiento profundo de las matemáticas y la física, existen herramientas y programas que pueden simplificar el proceso.
Preguntas frecuentes:
1. ¿Pueden los robots de 2 grados de libertad realizar tareas complejas?
Sí, los robots de 2 grados de libertad pueden ser programados para realizar tareas complejas, aunque su capacidad puede estar limitada en comparación con robots de mayor grado de libertad.
2. ¿Qué es la cinemática directa?
La cinemática directa es el proceso de calcular la posición de un robot a partir de sus movimientos. Es el proceso opuesto a la cinemática inversa.
3. ¿Pueden los robots de 2 grados de libertad ser utilizados en la industria?
Sí, los robots de 2 grados de libertad pueden ser utilizados en la industria para realizar tareas específicas, como soldadura o ensamblaje.
4. ¿Es necesario tener conocimientos avanzados de matemáticas para entender la cinemática inversa de un robot de 2 grados de libertad?
Sí, la cinemática inversa de un robot de 2 grados de libertad requiere de un conocimiento profundo de las matemáticas y la física. Sin embargo, existen herramientas y programas que pueden simplificar el proceso.
5. ¿Qué es la cinemática de un robot?
La cinemática de un robot se refiere al estudio de los movimientos del robot y cómo estos movimientos afectan su posición y orientación en el espacio.
Deja una respuesta