Cinematica inversa de un robot de 3 grados de libertad
La cinemática inversa de un robot de 3 grados de libertad es un concepto fundamental en la robótica. La cinemática inversa es la técnica que se utiliza para determinar los valores de las variables articulares de un robot, a partir de las coordenadas de posición y orientación de su extremo efector. En otras palabras, la cinemática inversa es el proceso de calcular la posición y orientación de las juntas de un robot, para que se pueda mover a una posición determinada.
Un robot de 3 grados de libertad es un tipo de robot que tiene tres juntas rotatorias, que le permiten moverse en tres dimensiones diferentes. Este tipo de robot se utiliza en una amplia variedad de aplicaciones, desde la fabricación hasta la exploración espacial.
¿Cómo funciona la cinemática inversa?
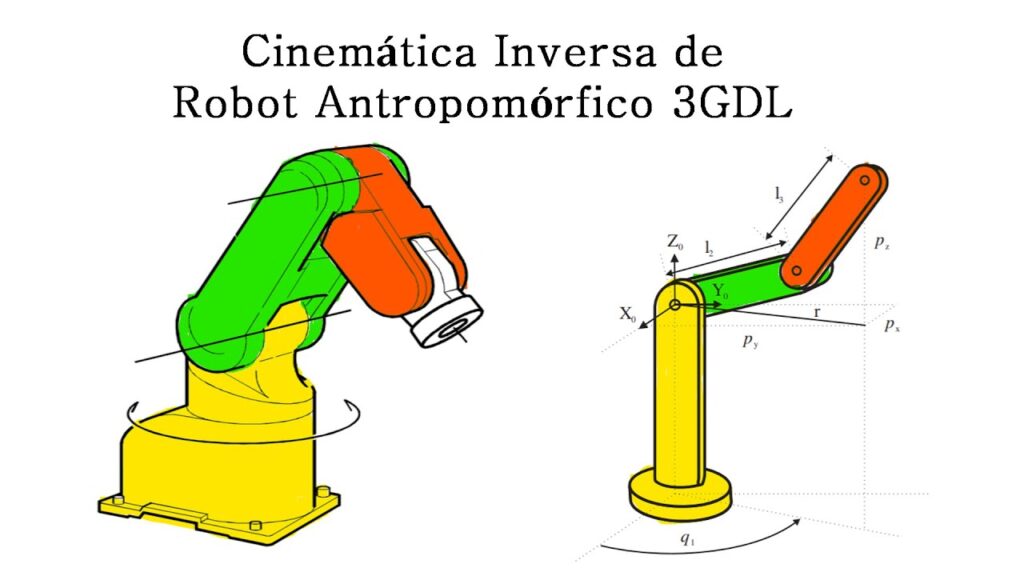
La cinemática inversa de un robot de 3 grados de libertad se basa en la geometría del robot y en la relación matemática entre las variables articulares y las coordenadas del extremo efector. La cinemática inversa se puede calcular utilizando una serie de ecuaciones matemáticas, que relacionan los valores de las variables articulares con las coordenadas del extremo efector.
Variables articulares y coordenadas del extremo efector
Las variables articulares son las variables que determinan la posición y orientación de las juntas del robot. Estas variables se miden en unidades de ángulo, como grados o radianes. Las coordenadas del extremo efector son las coordenadas cartesianas que definen la posición y orientación del extremo del robot en el espacio tridimensional.
Cálculo de la cinemática inversa
El cálculo de la cinemática inversa de un robot de 3 grados de libertad implica la resolución de un sistema de ecuaciones matemáticas. Estas ecuaciones se derivan de la geometría del robot y de la relación entre las variables articulares y las coordenadas del extremo efector.
Comparación con tablas
La cinemática inversa se puede comparar con una tabla HTML, en la que las variables articulares son las columnas y las coordenadas del extremo efector son las filas. Al igual que en una tabla HTML, la cinemática inversa permite determinar los valores de las variables articulares a partir de las coordenadas del extremo efector.
Aplicaciones de la cinemática inversa en robótica
La cinemática inversa se utiliza en una amplia variedad de aplicaciones en robótica. Algunas de las aplicaciones más comunes incluyen:
- Programación de robots industriales para realizar tareas específicas.
- Navegación de robots móviles en entornos complejos.
- Control de robots en aplicaciones de cirugía robótica.
- Control de robots en aplicaciones de exploración espacial.
Conclusión
La cinemática inversa de un robot de 3 grados de libertad es un concepto fundamental en la robótica. La cinemática inversa permite determinar los valores de las variables articulares de un robot, a partir de las coordenadas de posición y orientación de su extremo efector. La cinemática inversa se utiliza en una amplia variedad de aplicaciones en robótica, desde la fabricación hasta la exploración espacial.
Preguntas frecuentes
¿Qué es un robot de 3 grados de libertad?
Un robot de 3 grados de libertad es un tipo de robot que tiene tres juntas rotatorias, que le permiten moverse en tres dimensiones diferentes.
¿Qué son las variables articulares?
Las variables articulares son las variables que determinan la posición y orientación de las juntas del robot. Estas variables se miden en unidades de ángulo, como grados o radianes.
¿Qué son las coordenadas del extremo efector?
Las coordenadas del extremo efector son las coordenadas cartesianas que definen la posición y orientación del extremo del robot en el espacio tridimensional.
¿Para qué se utiliza la cinemática inversa en robótica?
La cinemática inversa se utiliza en robótica para determinar los valores de las variables articulares de un robot, a partir de las coordenadas de posición y orientación de su extremo efector. Se utiliza en una amplia variedad de aplicaciones en robótica, desde la fabricación hasta la exploración espacial.
¿Cómo se calcula la cinemática inversa?
El cálculo de la cinemática inversa de un robot de 3 grados de libertad implica la resolución de un sistema de ecuaciones matemáticas. Estas ecuaciones se derivan de la geometría del robot y de la relación entre las variables articulares y las coordenadas del extremo efector.
Deja una respuesta